5.2. Background#
5.2.1. Scheduling Algorithms#
RTEMS provides a plugin framework that allows it to support multiple scheduling algorithms. RTEMS includes multiple scheduling algorithms, and the user can select which of these they wish to use in their application at link-time. In addition, the user can implement their own scheduling algorithm and configure RTEMS to use it.
Supporting multiple scheduling algorithms gives the end user the option to select the algorithm which is most appropriate to their use case. Most real-time operating systems schedule tasks using a priority based algorithm, possibly with preemption control. The classic RTEMS scheduling algorithm which was the only algorithm available in RTEMS 4.10 and earlier, is a fixed-priority scheduling algorithm. This scheduling algorithm is suitable for uniprocessor (e.g., non-SMP) systems and is known as the Deterministic Priority Scheduler. Unless the user configures another scheduling algorithm, RTEMS will use this on uniprocessor systems.
5.2.2. Priority Scheduling#
When using priority based scheduling, RTEMS allocates the processor using a priority-based, preemptive algorithm augmented to provide round-robin characteristics within individual priority groups. The goal of this algorithm is to guarantee that the task which is executing on the processor at any point in time is the one with the highest priority among all tasks in the ready state.
When a task is added to the ready chain, it is placed behind all other tasks of the same priority. This rule provides a round-robin within a priority group scheduling characteristic. This means that in a group of equal priority tasks, tasks will execute in the order they become ready or FIFO order. Even though there are ways to manipulate and adjust task priorities, the most important rule to remember is:
Note
Priority based scheduling algorithms will always select the highest priority task that is ready to run when allocating the processor to a task.
Priority scheduling is the most commonly used scheduling algorithm. It should be used by applications in which multiple tasks contend for CPU time or other resources, and there is a need to ensure certain tasks are given priority over other tasks.
There are a few common methods of accomplishing the mechanics of this algorithm. These ways involve a list or chain of tasks in the ready state.
The least efficient method is to randomly place tasks in the ready chain forcing the scheduler to scan the entire chain to determine which task receives the processor.
A more efficient method is to schedule the task by placing it in the proper place on the ready chain based on the designated scheduling criteria at the time it enters the ready state. Thus, when the processor is free, the first task on the ready chain is allocated the processor.
Another mechanism is to maintain a list of FIFOs per priority. When a task is readied, it is placed on the rear of the FIFO for its priority. This method is often used with a bitmap to assist in locating which FIFOs have ready tasks on them. This data structure has \(O(1)\) insert, extract and find highest ready run-time complexities.
A red-black tree may be used for the ready queue with the priority as the key. This data structure has \(O(log(n))\) insert, extract and find highest ready run-time complexities while \(n\) is the count of tasks in the ready queue.
RTEMS currently includes multiple priority based scheduling algorithms as well as other algorithms that incorporate deadline. Each algorithm is discussed in the following sections.
5.2.3. Scheduling Modification Mechanisms#
RTEMS provides four mechanisms which allow the user to alter the task scheduling decisions:
user-selectable task priority level
task preemption control
task timeslicing control
manual round-robin selection
Each of these methods provides a powerful capability to customize sets of tasks to satisfy the unique and particular requirements encountered in custom real-time applications. Although each mechanism operates independently, there is a precedence relationship which governs the effects of scheduling modifications. The evaluation order for scheduling characteristics is always priority, preemption mode, and timeslicing. When reading the descriptions of timeslicing and manual round-robin it is important to keep in mind that preemption (if enabled) of a task by higher priority tasks will occur as required, overriding the other factors presented in the description.
5.2.3.1. Task Priority and Scheduling#
The most significant task scheduling modification mechanism is the ability for the user to assign a priority level to each individual task when it is created and to alter a task’s priority at run-time, see Task Priority.
5.2.3.2. Preemption#
Another way the user can alter the basic scheduling algorithm is by
manipulating the preemption mode flag (RTEMS_PREEMPT_MASK) of individual
tasks. If preemption is disabled for a task (RTEMS_NO_PREEMPT), then the
task will not relinquish control of the processor until it terminates, blocks,
or re-enables preemption. Even tasks which become ready to run and possess
higher priority levels will not be allowed to execute. Note that the
preemption setting has no effect on the manner in which a task is scheduled.
It only applies once a task has control of the processor.
5.2.3.3. Timeslicing#
Timeslicing or round-robin scheduling is an additional method which can be used
to alter the basic scheduling algorithm. Like preemption, timeslicing is
specified on a task by task basis using the timeslicing mode flag
(RTEMS_TIMESLICE_MASK). If timeslicing is enabled for a task
(RTEMS_TIMESLICE), then RTEMS will limit the amount of time the task can
execute before the processor is allocated to another task. Each tick of the
real-time clock reduces the currently running task’s timeslice. When the
execution time equals the timeslice, RTEMS will dispatch another task of the
same priority to execute. If there are no other tasks of the same priority
ready to execute, then the current task is allocated an additional timeslice
and continues to run. Remember that a higher priority task will preempt the
task (unless preemption is disabled) as soon as it is ready to run, even if the
task has not used up its entire timeslice.
5.2.3.4. Manual Round-Robin#
The final mechanism for altering the RTEMS scheduling algorithm is called
manual round-robin. Manual round-robin is invoked by using
the rtems_task_wake_after directive with a ticks parameter of
RTEMS_YIELD_PROCESSOR. This allows a task to give up the processor and be
immediately returned to the ready chain at the end of its priority group. If
no other tasks of the same priority are ready to run, then the task does not
lose control of the processor.
5.2.4. Dispatching Tasks#
The dispatcher is the RTEMS component responsible for allocating the processor to a ready task. In order to allocate the processor to one task, it must be deallocated or retrieved from the task currently using it. This involves a concept called a context switch. To perform a context switch, the dispatcher saves the context of the current task and restores the context of the task which has been allocated to the processor. Saving and restoring a task’s context is the storing/loading of all the essential information about a task to enable it to continue execution without any effects of the interruption. For example, the contents of a task’s register set must be the same when it is given the processor as they were when it was taken away. All of the information that must be saved or restored for a context switch is located either in the TCB or on the task’s stacks.
Tasks that utilize a numeric coprocessor and are created with the
RTEMS_FLOATING_POINT attribute require additional operations during a
context switch. These additional operations are necessary to save and restore
the floating point context of RTEMS_FLOATING_POINT tasks. To avoid
unnecessary save and restore operations, the state of the numeric coprocessor
is only saved when a RTEMS_FLOATING_POINT task is dispatched and that task
was not the last task to utilize the coprocessor.
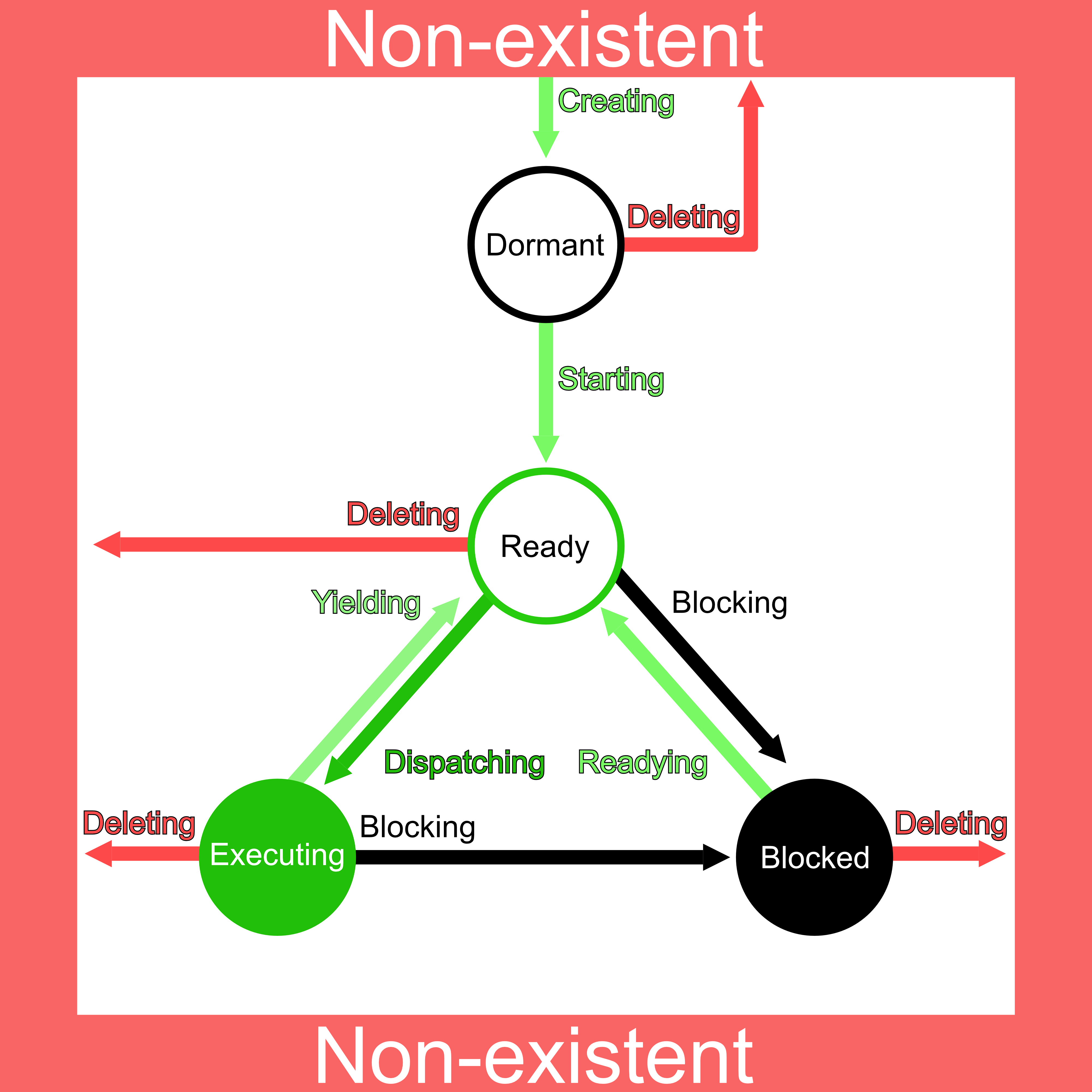
5.2.5. Task State Transitions#
Tasks in an RTEMS system must always be in one of the five allowable task states. These states are: executing, ready, blocked, dormant, and non-existent.
A task occupies the non-existent state before a rtems_task_create has been
issued on its behalf. A task enters the non-existent state from any other
state in the system when it is deleted with the rtems_task_delete
directive. While a task occupies this state it does not have a TCB or a task
ID assigned to it; therefore, no other tasks in the system may reference this
task.
When a task is created via the rtems_task_create directive, it enters the
dormant state. This state is not entered through any other means. Although
the task exists in the system, it cannot actively compete for system resources.
It will remain in the dormant state until it is started via the
rtems_task_start directive, at which time it enters the ready state. The
task is now permitted to be scheduled for the processor and to compete for
other system resources.
A task occupies the blocked state whenever it is unable to be scheduled to run.
A running task may block itself or be blocked by other tasks in the system.
The running task blocks itself through voluntary operations that cause the task
to wait. The only way a task can block a task other than itself is with the
rtems_task_suspend directive. A task enters the blocked state due to any
of the following conditions:
A task issues a
rtems_task_suspenddirective which blocks either itself or another task in the system.The running task issues a
rtems_barrier_waitdirective.The running task issues a
rtems_message_queue_receivedirective with the wait option, and the message queue is empty.The running task issues a
rtems_event_receivedirective with the wait option, and the currently pending events do not satisfy the request.The running task issues a
rtems_semaphore_obtaindirective with the wait option and the requested semaphore is unavailable.The running task issues a
rtems_task_wake_afterdirective which blocks the task for the given count of ticks. If the count of ticks specified is zero, the task yields the processor and remains in the ready state.The running task issues a
rtems_task_wake_whendirective which blocks the task until the requested date and time arrives.The running task issues a
rtems_rate_monotonic_perioddirective and must wait for the specified rate monotonic period to conclude.The running task issues a
rtems_region_get_segmentdirective with the wait option and there is not an available segment large enough to satisfy the task’s request.
A blocked task may also be suspended. Therefore, both the suspension and the blocking condition must be removed before the task becomes ready to run again.
A task occupies the ready state when it is able to be scheduled to run, but currently does not have control of the processor. Tasks of the same or higher priority will yield the processor by either becoming blocked, completing their timeslice, or being deleted. All tasks with the same priority will execute in FIFO order. A task enters the ready state due to any of the following conditions:
A running task issues a
rtems_task_resumedirective for a task that is suspended and the task is not blocked waiting on any resource.A running task issues a
rtems_message_queue_send,rtems_message_queue_broadcast, or artems_message_queue_urgentdirective which posts a message to the queue on which the blocked task is waiting.A running task issues an
rtems_event_senddirective which sends an event condition to a task that is blocked waiting on that event condition.A running task issues a
rtems_semaphore_releasedirective which releases the semaphore on which the blocked task is waiting.The requested count of ticks has elapsed for a task which was blocked by a call to the
rtems_task_wake_afterdirective.A timeout period expires for a task which blocked by a call to the
rtems_task_wake_whendirective.A running task issues a
rtems_region_return_segmentdirective which releases a segment to the region on which the blocked task is waiting and a resulting segment is large enough to satisfy the task’s request.A rate monotonic period expires for a task which blocked by a call to the
rtems_rate_monotonic_perioddirective.A timeout interval expires for a task which was blocked waiting on a message, event, semaphore, or segment with a timeout specified.
A running task issues a directive which deletes a message queue, a semaphore, or a region on which the blocked task is waiting.
A running task issues a
rtems_task_restartdirective for the blocked task.The running task, with its preemption mode enabled, may be made ready by issuing any of the directives that may unblock a task with a higher priority. This directive may be issued from the running task itself or from an ISR. A ready task occupies the executing state when it has control of the CPU. A task enters the executing state due to any of the following conditions:
The task is the highest priority ready task in the system.
The running task blocks and the task is next in the scheduling queue. The task may be of equal priority as in round-robin scheduling or the task may possess the highest priority of the remaining ready tasks.
The running task may reenable its preemption mode and a task exists in the ready queue that has a higher priority than the running task.
The running task lowers its own priority and another task is of higher priority as a result.
The running task raises the priority of a task above its own and the running task is in preemption mode.